~双腕モバイルマニピュレーターの開発・製造に挑戦、国産汎用ロボットの実用化へ~
株式会社Keigan(本社:京都府相楽郡精華町、代表取締役:徳田 貴司、以下「Keigan」)は、一 般社団法人AIロボット協会(AIRoA)が主催する「国産汎用ロボット開発コンペティション」 (NEDO委託事業の一環として実施するもの※)に採択されたことをお知らせします。 本コンペティションは、日本のロボット産業の競争力強化を目的に実施されるものであり、Keigan は2026年3月より双腕モバイルマニピュレーターの試作機開発・製造に取り組みます。
■ 採択の概要
Keigan は長年にわたりサーボモーター「KeiganMotor」の開発・製造および自律移動ロボット 「KeiganALI」の開発・販売を通じて、ロボット・モーション分野での技術を積み上げてきました。 本コンペティションでは、これらの技術資産を活かし、アクチュエータから制御ソフトウェアまで 一気通貫で内製可能な体制を強みとして、国産汎用ロボットの開発に挑みます。
■ 開発するロボットについて
Keigan が開発・製造するのは、双腕モバイルマニピュレーター(試作機)です。

開発にあたっては、立命館大学理工学部ロボティクス学科アクチュエーション研究室の加古川 篤 准 教授を技術アドバイザーに迎え、アクチュエータ設計・制御技術,ロボット設計・制御技術の高度 化を推進します。 なお、Keiganは2019年度のNEDO新産業創出新技術先導研究プログラムにおいて、立命館大学と の共同研究「多能工ロボット実現のための機械的接触基盤ロボット技術開発」を実施し、ロボット アームの試作・研究開発に取り組んだ実績を有しています。今回のコンペティションは、この研究 成果を社会実装へと発展させる取り組みとも位置づけています。
■ スケジュール
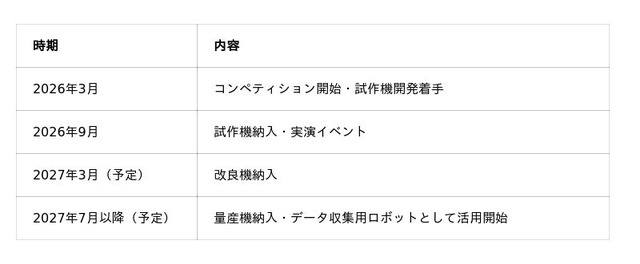
※ 2026 年9月以降の改良期間および量産期間のスケジュールは、各期間への移行にあたり評価結果に基づくAIRoA の判定が行われるため、その結果次第で変更となる可能性があります
■コメント
代表取締役 徳田 貴司
「Keigan は創業以来、モーターモジュールの内製から自律移動ロボットの量産・現場導入まで、ハ ードウェアとソフトウェアを一体で手がけてきました。今回、その技術の集大成として双腕モバイ ルマニピュレーターの開発に挑戦できることを大変光栄に思います。 汎用ロボットが実用段階を迎えようとしているこの時期に、国産の技術でその一翼を担えるよう、 チーム一丸となって取り組んでまいります。本プロジェクトを通じて、日本のロボット産業の競争 力強化に貢献できれば幸いです。」
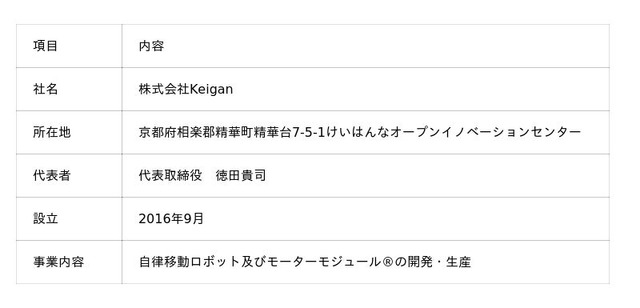
■株式会社Keiganについて
2016 年に京都府で創業したロボット企業です。「Quick and Easy Robot for Everyone」の理念のも と、人の役に立つロボットを驚くほど簡単に、かつ瞬時につくることのできる仕組みを多くの人々 に提供し、社会に貢献することを目指しています。
モーターモジュール(R)KeiganMotorシリーズは自動車工場における自動化をはじめ、企業や大学の 研究開発部門で利用されています。自律移動ロボットKeiganALIは工場での工程間搬送のほか、レ ストランや物流現場で利用されています。
法人ウェブサイト:https://www.keigan.co.jp/
KeiganALI ウェブサイト:https://www.keigan-ali.com/
KeiganMotor ウェブサイト:https://keigan-motor.com/
X:https://twitter.com/KEIGAN_PR
LinkedIn:https://www.linkedin.com/company/keigan/
※本コンペティションは、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託事業「ポスト5G情報通信システ ム基盤強化研究開発事業/ロボティクス分野の生成AI基盤モデルの開発に向けたデータプラットフォームに係る開発」の一環とし て、一般社団法人AIロボット協会(AIRoA)が実施するものです。
企業プレスリリース詳細へ
PR TIMESトップへ













